



El prototipo se probó en el tanque de pruebas del Departamento de Ingeniería Naval de la Universidad de São Paulo, en Brasil (foto: UFABC/ Divulgación)
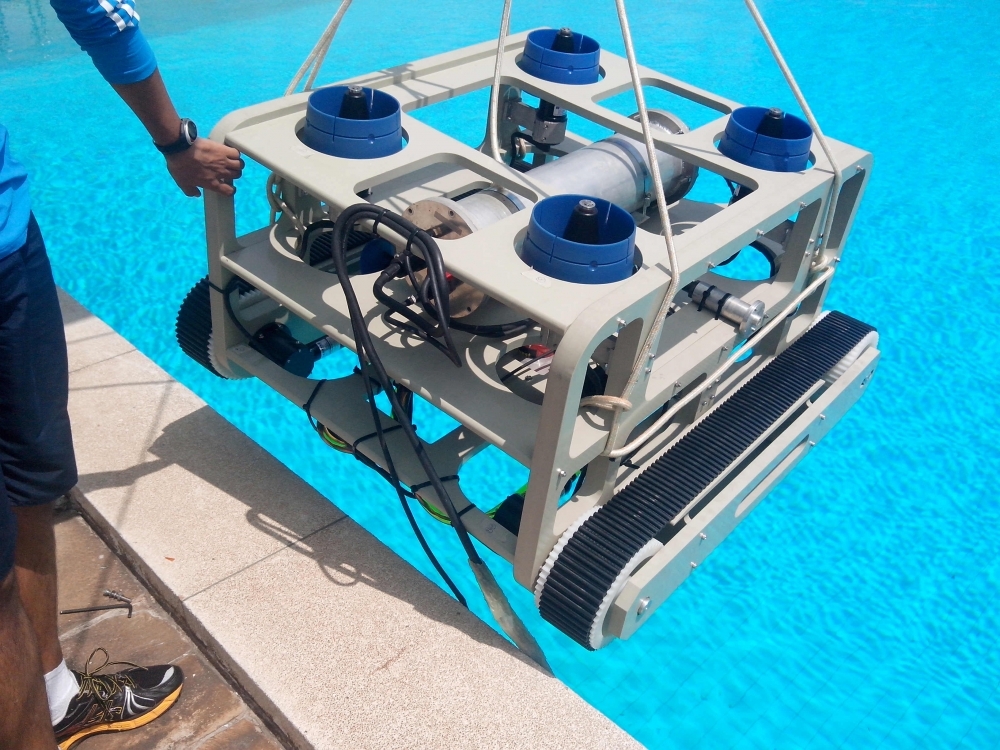
Aparte de navegar debajo del agua con propulsores de hélice, el aparato también es capaz de adherirse al casco de los barcos y desplazarse mediante orugas
Aparte de navegar debajo del agua con propulsores de hélice, el aparato también es capaz de adherirse al casco de los barcos y desplazarse mediante orugas
El prototipo se probó en el tanque de pruebas del Departamento de Ingeniería Naval de la Universidad de São Paulo, en Brasil (foto: UFABC/ Divulgación)
Por José Tadeu Arantes
Agência FAPESP – En la Universidad Federal del ABC (UFABC), en São Paulo, han fabricado un vehículo robótico submarino destinado a la inspección de cascos de buques. El proyecto, desarrollado por alumnos de pregrado y posgrado en Ingeniería Mecánica, estuvo coordinado por el profesor Juan Pablo Julca Avila, y contó con el apoyo de la FAPESP.
Un prototipo del vehículo –con propulsores, orugas motorizadas, flotadores y sensores– ya ha sido probado con éxito en una piscina de buceo y en el tanque de pruebas del Departamento de Ingeniería Naval de la Universidad de São Paulo (USP). Y ha respondido adecuadamente a los mandos remotos de los operadores en los modos de “vuelo libre” y “rastreo”. “Ahora, en la segunda etapa de la investigación, pretendemos llevarlo a Santos para probar su locomoción y el sistema de adherencia sobre el casco de un buque en altamar”, declaró Avila a Agência FAPESP.
La gran diferencia de este vehículo en comparación con otros similares reside en que, además de efectuar la inspección visual del casco, mediante el empleo de una cámara, también puede desplazarse sobre el mismo mediante cintas u orugas, según el investigador. De este modo, y utilizando un aparato de ultrasonido, es capaz de detectar eventuales fisuras o fallas estructurales y verificar si el espesor del casco se ubica dentro de los límites de tolerancia.
La adherencia del vehículo al buque se obtiene por medios puramente mecánicos, con el uso de cuatro propulsores dispuestos verticalmente. Al girar en un sentido, las hélices de los propulsores lo presionan contra o casco; al girar en el sentido contrario, hacen que se aparte. De este modo se evitaron las ruedas magnéticas, que limitarían su operación solamente a cascos de acero y también lo volverían muy pesado y difícil de maniobrar.
“Se trata de un vehículo robótico híbrido que combina dos modos de operación. El primero es el de ‘vuelo libre’, en el cual, con propulsión por hélices, se mueve debajo del agua dirigiéndose a la zona de interés. Una vez que está cerca del buque, el vehículo se posiciona de manera tal que su base quede en contacto con el casco. Entonces entra en funcionamiento el segundo modo de operación, que es el de ‘rastreo’, en el cual se vale de orugas motorizadas para desplazarse”, detalló el investigador.
Control automático de adherencia
Esa funcionalidad adicional lo convierte en un HROV (Hybrid Remotely Operated Vehicle), y no simplemente en un ROV (Remotely Operated Vehicle), como los similares más convencionales. El vehículo, montado sobre una estructura de polipropileno, funciona con energía eléctrica suministrada por una fuente externa y transmitida mediante de un cable umbilical. “Con su robustez estructural y su control automático de adherencia basado en la medición de la presión de contacto, es capaz de operar en ambiente offshore”, afirmó Avila.
El investigador informó que su grupo ha entrado en contacto con el órgano de la UFABC encargado de las solicitudes de patentes. Juan Pablo Julca Avila, graduado en Ingeniería Mecánica en la Universidad Nacional de Trujillo, realizó su maestría y su doctorado en la Escuela Politécnica de la USP. Actualmente es profesor adjunto del grupo de Ingeniería Aeroespacial de la UFABC.
Videos
 |
 |
 |
 |
The Agency FAPESP licenses news via Creative Commons (CC-BY-NC-ND) so that they can be republished free of charge and in a simple way by other digital or printed vehicles. Agência FAPESP must be credited as the source of the content being republished and the name of the reporter (if any) must be attributed. Using the HMTL button below allows compliance with these rules, detailed in Digital Republishing Policy FAPESP.
